আজকে আমাদের আলোচনার বিষয়-সাত চাকা টেক আপ হুইলের হিসাব
সাত চাকা টেক আপ হুইলের হিসাব (Culculation of 7 wheel take-up motion)
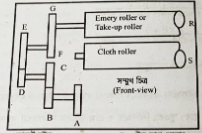
চিত্র ঃ ১.৬ সাত চাকার টেক-আপ মোশন
A র্যাচেট হুইল
B – স্ট্যান্ডার্ড হুইল
C – চেইঞ্জ হুইল
D – সুইং পিনিয়ন
E – ক্যারিয়ার হুইল
F- ক্যারিয়ার পিনিয়ন
G – ইমারি রোলার
R – টেক-আপ রোলার
M- পুশিং পউল
N- রিটার্নিং পউল
O – স্নে সোর্ড
P – মাঙ্কি টেইল
Q – টেক-আপ লিভার
S – ক্লথ রোলার ।

র্যাচেট হুইল একবার ঘূর্ণনের ফলে কাপড়ে যতগুলো পিক সম্পন্ন হয় এবং ঐ সময়ে ক্লথ রোলারে যতটুকু কাপড় ড়ায়, তাদের অনুপাতকে পিকস্ পার ইঞ্চি (Picks per inch) সংক্ষেপে PPI বলে।
অর্থাৎ, পিকস/ইঞ্চি
র্যাচেট হুইলের পূর্ণ ঘূর্ণনে উৎপন্ন পিক
= * ক্লথ রোলার কর্তৃক গ্রহণকৃত কাপড়ের দৈর্ঘ্য (ইঞ্চিতে)…. (3)
র্যাচেট হুইলের প্রতি ঘূর্ণনে কতটুকু কাপড় ক্লথ রোলারে জড়ায় তা নিম্নলিখিতভাবে বের করা যায়-
অর্থাৎ, রুথ রোলারে জড়ানো কাপড়ের পরিমাণ স্ট্যান্ডার্ড হুইল × সুইং পিনিয়ন x স্টাড পিনিয়ন X টেক-
আপ রোলারের পরিধি
চেঞ্জ পিনিয়ন × স্টাড হুইল × বিম হুইল X
B× DxFx টেক-আপ রোলারের পরিধি CXEXG
যদি র্যাচেট হুইল একবার ঘুরলে A সংখ্যক পিক সম্পন্ন হয়, তবে ১নং সমীকরণ অনুসারে পাই,
পিপিআই =
ABD × Fx টেক-আপ রোলারের পরিধি CXEXG
AXCXEXG = B × D x F x টেক-আপ রোলারের পরিধি
= C x লুম কনস্ট্যান্ট
বা, চেঞ্জ হুইল =
আমরা জানি,
পিপিআই
লুম কনস্ট্যান্ট
চেঞ্জ হুইলের দাঁতসংখ্যা ১ ধরে যে পিপিআই পাই, তাই লুম কনস্ট্যান্ট। অর্থাৎ ৩ নং সমীকরণ থেকে পাই,
লুম কনস্ট্যান্ট
= AX(C=1)XEXG
* B × D x F x টেক-আপ রোলারের পরিধি AXEXG
B × D x F × টেক-আপ রোলারের পরিধি
এবং পিক স্পেসিং (Pick spacing) = পিপিআই
এখানে উল্লেখ্য যে, ৭ চাকার হুইলগুলো এমনভাবে সাজানো থাকে যে, স্ট্যান্ডার্ড হুইলের দাঁতসংখ্যা ৩৬
সংকোচন ধরে) লুম কনস্ট্যান্ট ১ হবে। সুতরাং পিপিআই ও চেঞ্জ হুইলের দাঁতসংখ্যা সমান হবে। অর্থাৎ, চেঞ্জ হুইলে ঘুর দাঁতসংখ্যা যত হবে কাপড়ের পিপিআই-ও ততো হবে।
AXCXEXG বা, পিপিআই = চেঞ্জ হুইল × লুম কনস্ট্যান্ট
অর্থাৎ, পিপিআই = B × D × F × রোলারের পরিধি + ১২%
= চেঞ্জ হুইল (C) × ১
:: পিপিআই = চেঞ্জ হুইল
