আজকে আমাদের আলোচনার বিষয়-পাঁচ চাকার টেক আপ মোশনের হিসাব
পাঁচ চাকার টেক আপ মোশনের হিসাব (Calculation of 5 wheel take-up motion)
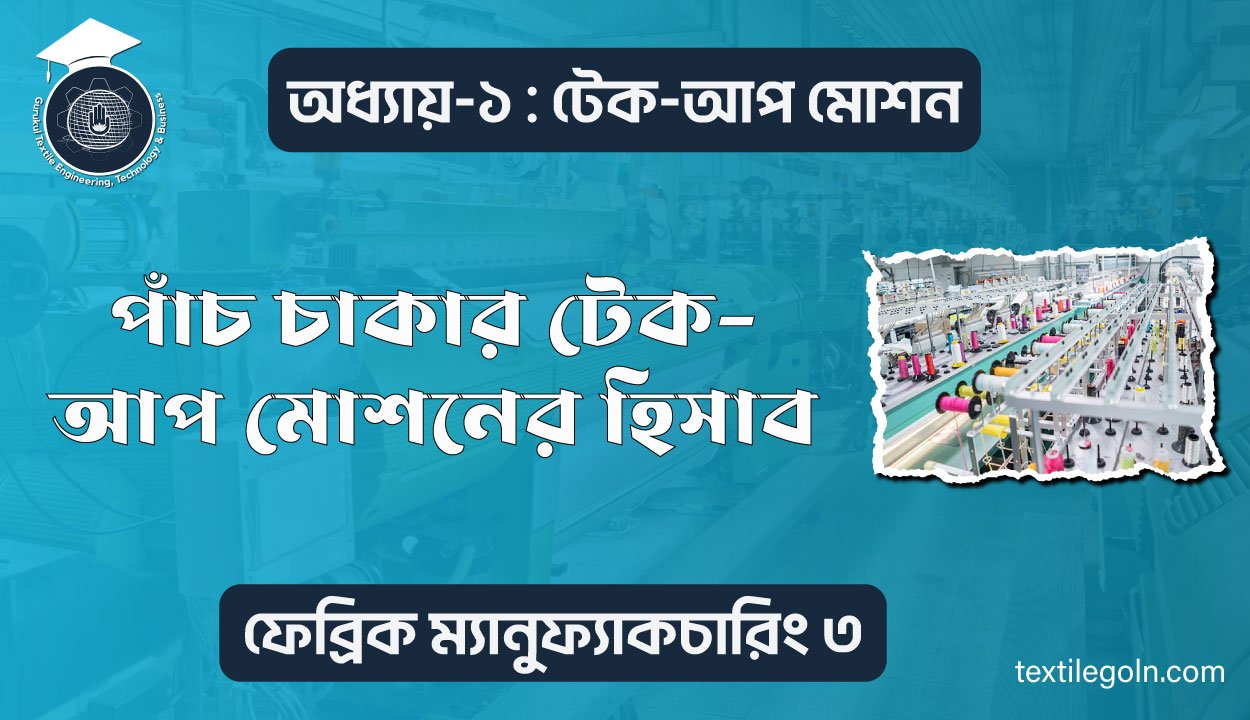
চিত্র : ১.২ পাঁচ চাকার টেক-আপ মোশন
এখানে
C = চেঞ্জ হুইল
G = স্টাড হুইল
E: = র্যাচেড হুইল
H = স্টাড পিনিয়ন
I = পিন হুইল বা টেক-আপ রোলার হুইল বা বিম হুইল
J = টেক-আপ বা পিন রোলার
K = রুথ রোলার বা বিম
আমরা জানি, র্যাচেট হুইল একবার পূর্ণ ঘূর্ণনে কাপড়ে যতগুলো পিক হয় তার সংখ্যা ও ঐ সময়ে ক্লথ রোলারে যতটুকু কাপড় জড়ায় এই দুইটির অনুপাতকে প্রতি ইঞ্চিতে পিকসংখ্যা (Pick per inch) বা সংক্ষেপে PPI বলে। অর্থাৎ
র্যাচেটের একক ঘূর্ণনে পিকের সংখ্যা

পিকস/ইঞ্চি = * ক্লথ রোলার কর্তৃক গ্রহণকৃত কাপড়ের দৈর্ঘ্য (ইঞ্চিতে)
যদি র্যাচেট হুইলের দাঁতসংখ্যা ‘E’ হয়, তবে র্যাচেট হুইলের প্রতি ঘূর্ণনের জন্য যে সংখ্যক পিক সম্পন্ন হয়,
তা র্যাচেট হুইলের দাঁতসংখ্যার সমান হবে। র্যাচেট হুইলের প্রতি ঘূর্ণনের জন্য যে পরিমাণ দৈর্ঘ্যের কাপড় ক্লথ রোলারে জড়ায়, তা নিম্নলিখিতভাবে বের করা যায়-
কাপড় জড়ানোর পরিমাণ = চেঞ্জ হুইল স্টাড পিনিয়ন স্টাড হুইল X বিম হুইল × টেক-আপ রোলারের পরিধি = × × টেক-আপ রোলারের পরিধি ……..১
(২) র্যাচেট হুইলের একবার ঘূর্ণনে যদি ‘E’ সংখ্যক পিক সম্পন্ন হয়, তবে ১নং সমীকরণ অনুযায়ী,
|PPI = E CH x টেক-আপ রোলারের পরিধি
EXGXI …(৩)
=2১৭
°C x H x টেক-আপ রোলারের পরিধি
constant or dividen বলে), সুতরাং কোনো কাপড়ের PPI পরিবর্তন করতে হলে শুধু চেঞ্জ হুইলের দাঁতসংখ্যা পরিবর্তন করতে হবে।
হয় ১৮ ফেব্রিক ম্যানুফ্যাকচারিং-৩
লুম কনস্ট্যান্ট বা ডিভিডেন্ড অর্থাৎ, PPI =
স্ট্যা চেঞ্জ হুইল
থাব লুম কনস্ট্যান্ট বা, চেঞ্জ হুইল পিপিআই এ
আমরা জানি, চেঞ্জ হুইলের দাঁতসংখ্যা ১ ধরে যে পিপিআই পাওয়া যায়, তাই লুম কনস্ট্যান্ট। অর্থাৎ, থেকে পাই, ৩ নং সমীকরণ
টেলুম কনস্ট্যান্ট =
EXGXI ( C = 1 ) x H x টেক-আপ রোলারের পরিধি
EXGXI Hx টেক-আপ রোলারের পরিধি (8)
তাঁত হতে কাপড় বের হবার পর কাপড় কিছুটা খেপে যায় বা সংকুচিত (Contraction or Shrinkage) হয়।
ফলে কাপড়ের ঘনত্ব বেড়ে যায়। কটন কাপড়ে ১-৫% সংকোচন হয়। তবে সাধারণ কটন কাপড়ে ১ %
সংকোচন হয় বলে তা ধরে পাই,
%… পিপিআই =
EXGXI C x H x টেক-আপ রোলারের পরিধি+লুম ধ্রুব (K) বা, পিপিআই = চেঞ্জ হুইল
লুম ধ্রুব (K) অর্থাৎ, চেঞ্জ হুইল = পিপি আই
